前言
第1章 工業機器人概述
1.1 機器人的產生與發展
1.2 機器人的分類與概況
1.3 工業機器人的應用與產品
第2章工業機器人的組成與效能
2.1 工業機器人的組成與特點
2.2 工業機器人的結構形態
2.3 工業機器人的技術性能
第3章工業機器人的機械結構
3.1 垂直串聯機器人
3.2 SCARA及Delta機器人
3.3 工業機器人結構實例
第4章機械核心套件及安裝維護
4.1 CRB軸承及同步帶
4.2 滾珠絲杠
4.3 捲動導軌
4.4 諧波減速器原理與產品
4.5 套件型諧波減速器譯型程式的區別
4.6 單元型諧波減速器
4.7 簡易單元型諧波減速器
4.8 齒輪箱型諧波減速器
4.9 微型諧波減速器
4.10 RV減速器原理與產品
4.11 套件型RV減速器
4.12 齒輪箱型RV減速器
第5章電氣控制系統的安裝連接
5.1 系統組成與連接總圖
5.2 控制套件及安裝連接
5.3 伺服驅動器安裝連接
5.4 機器人的電氣連接
第6章工業機器人基本指令程式設計
6.1 程式格式與控制指令
6.2 移動指令程式設計與實例
6.3 輸入/輸出指令程式設計與實例
6.4 程式控制指令程式設計與實例
6.5 變數的程式設計與實例
6.6 平移指令程式設計與實例
第7章點焊機器人作業程式編制
7.1 焊接機器人概述
7.2 機器人點焊系統
7.3 點焊作業檔案的編制
7.4 點焊作業指令程式設計與實例
第8章弧焊機器人作業程式編制
8.1 機器人弧焊系統
8.2 弧焊作業檔案的編制
8.3 弧焊作業指令程式設計
8.4 擺焊作業指令程式設計與實例
第9章其他機器人作業程式編制
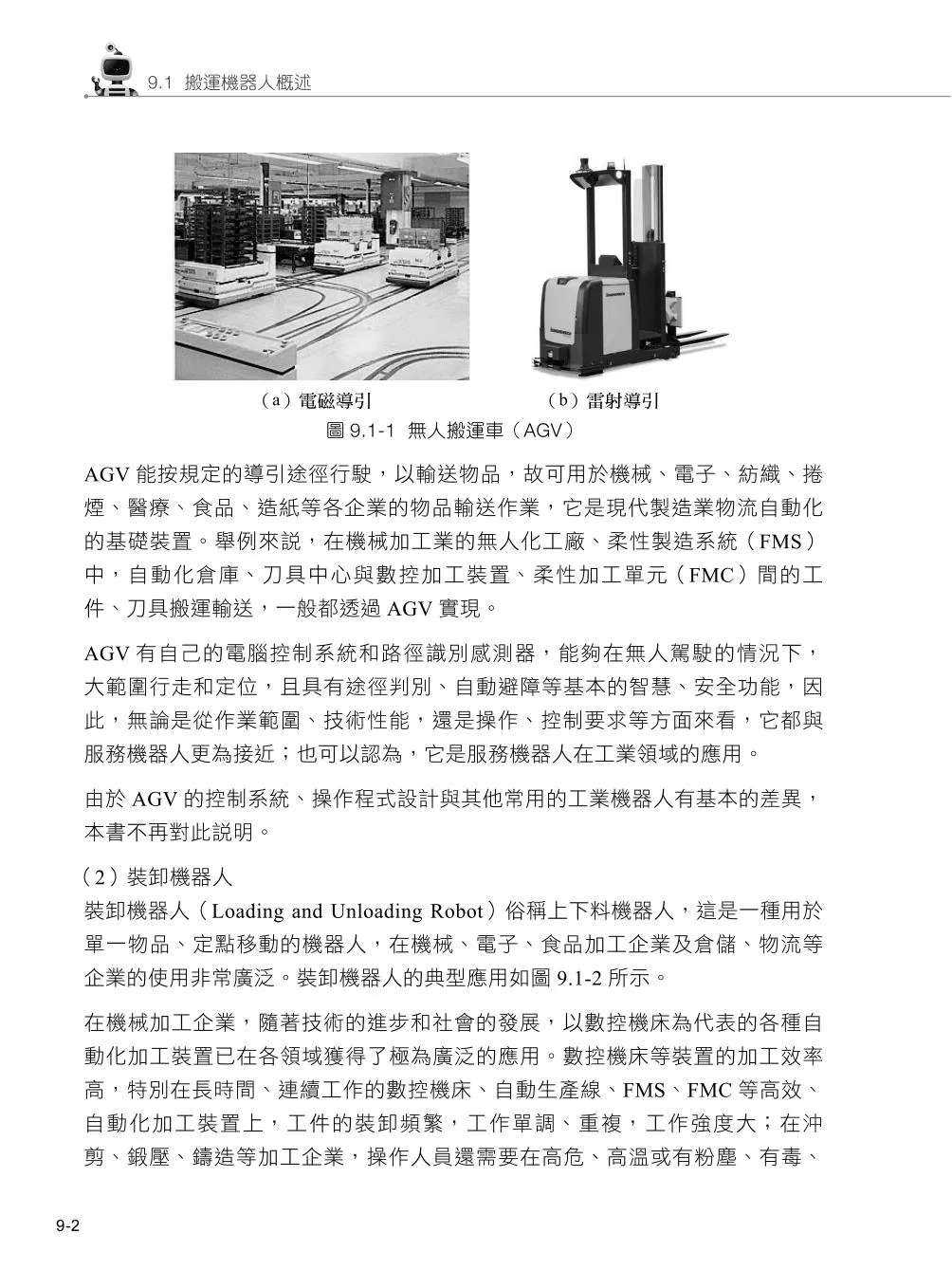
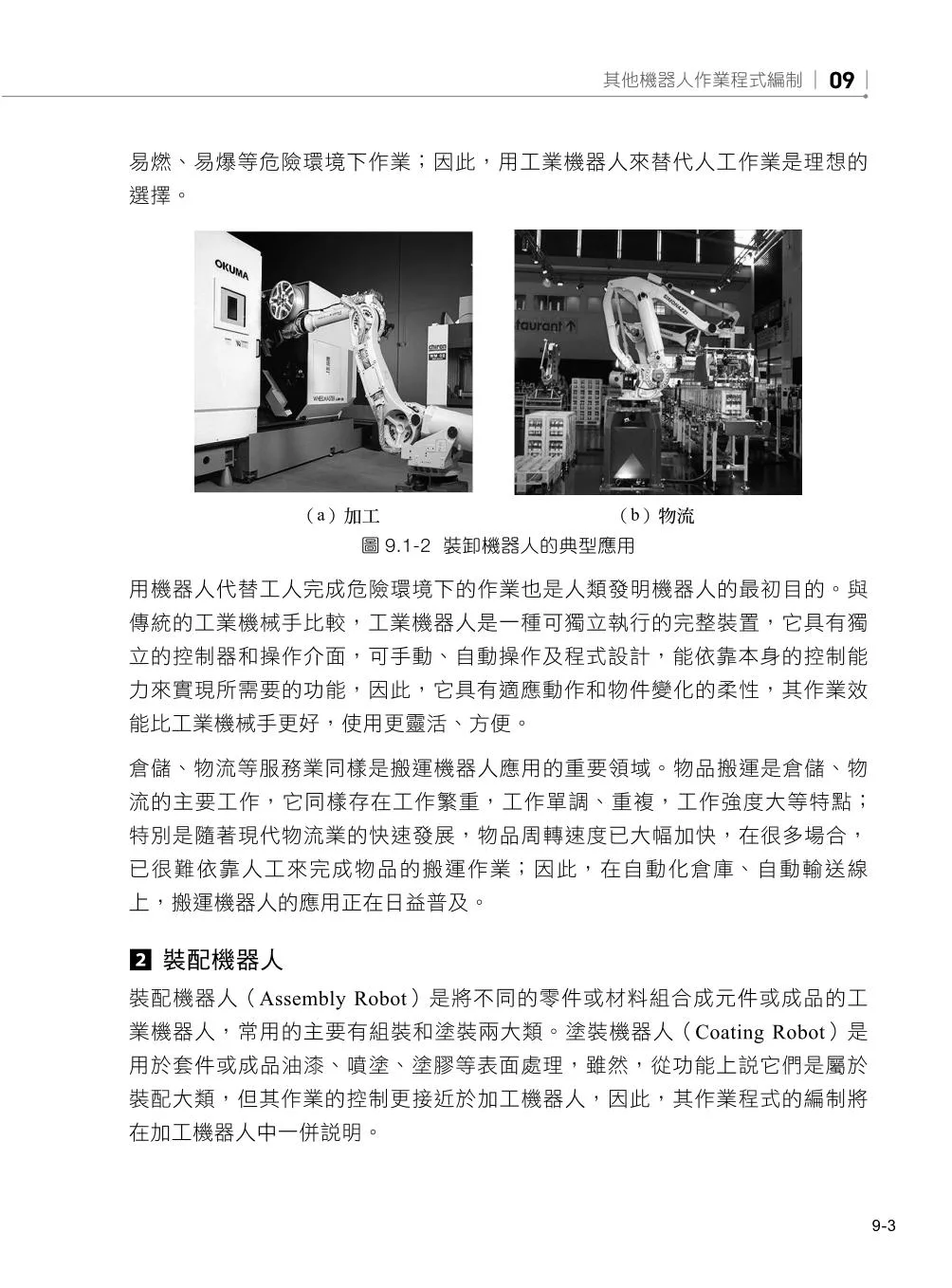
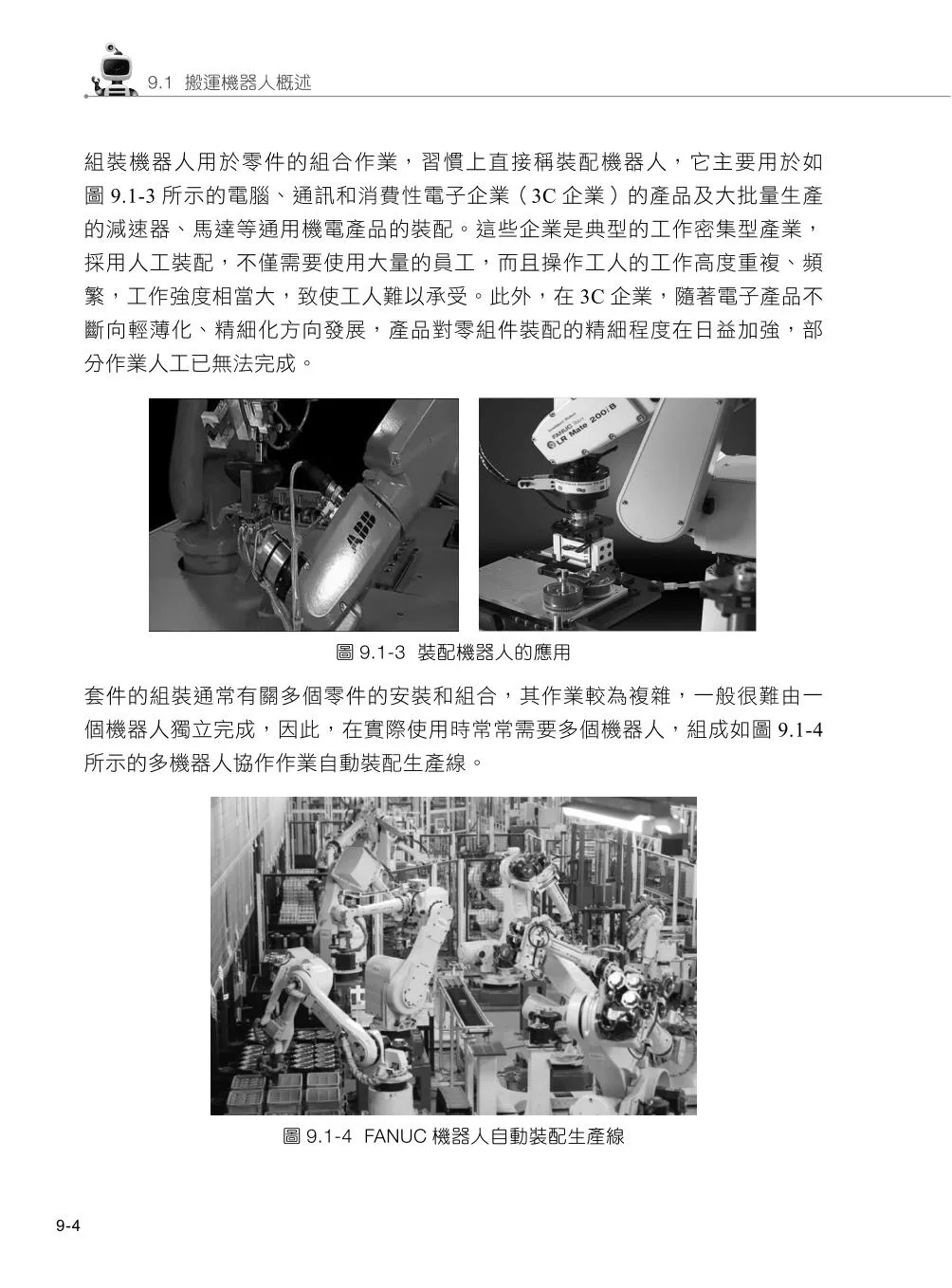
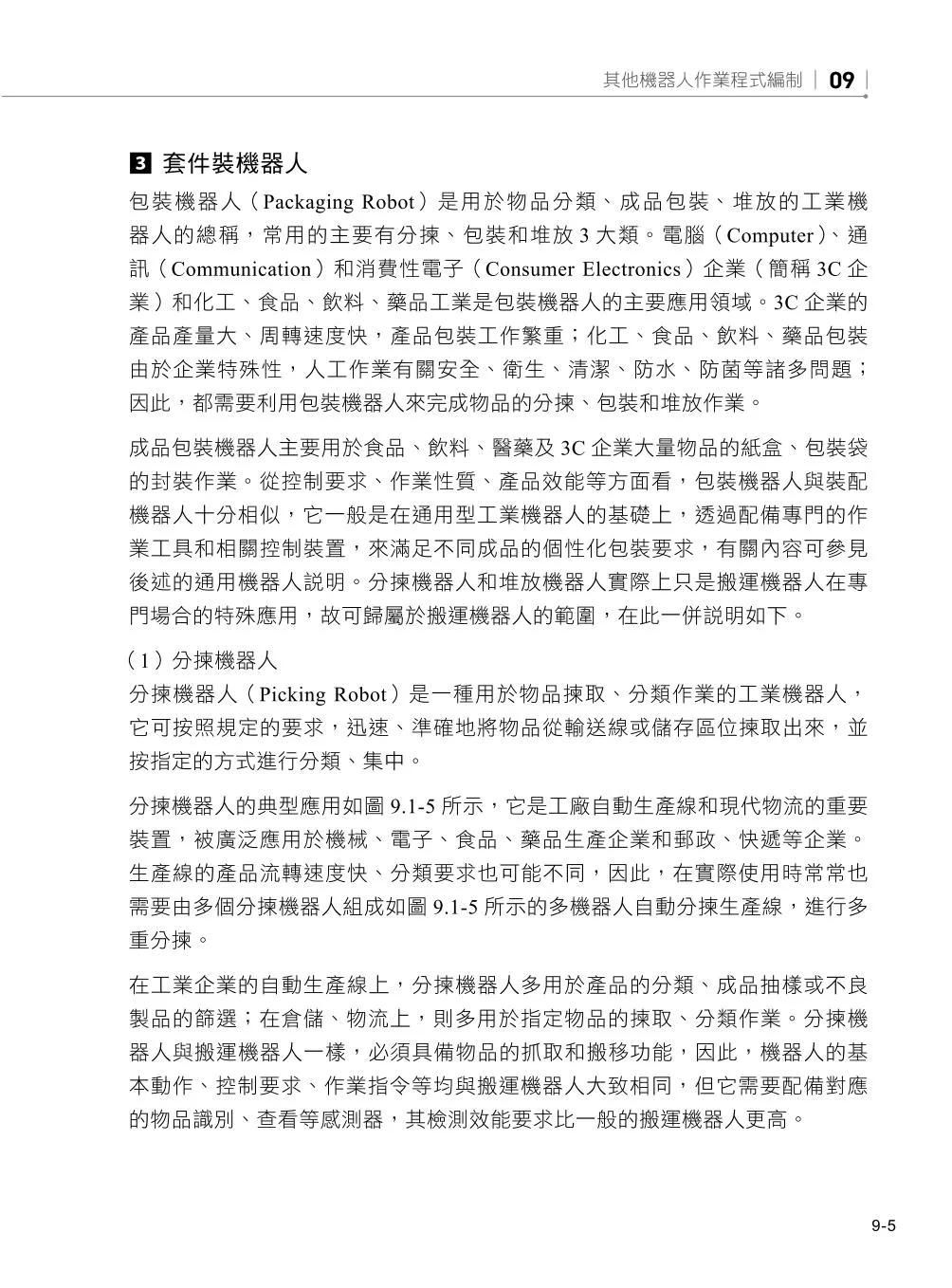
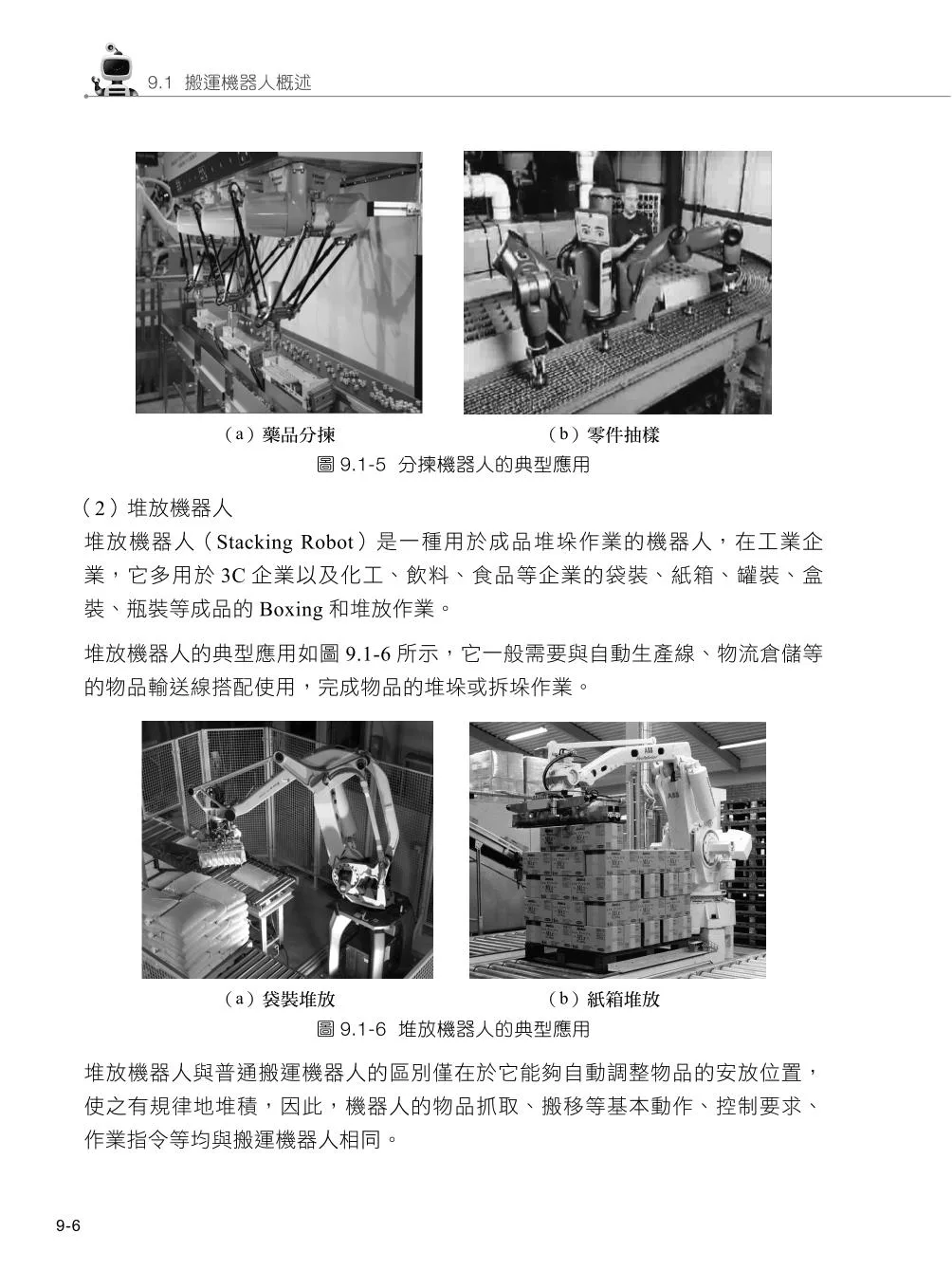
9.1 搬運機器人概述
9.2 搬運作業指令程式設計與實例
9.3 通用機器人概述
9.4 通用作業指令程式設計
第10章機器人手動與示教操作
10.1 示教器及功能
10.2 機器人的安全操作
10.3 機器人手動操作
10.4 機器人的示教程式設計
10.5 指令的編輯操作
第11章程式的編輯和再現執行
11.1 程式的編輯
11.2 速度修改、程式點檢查與試執行
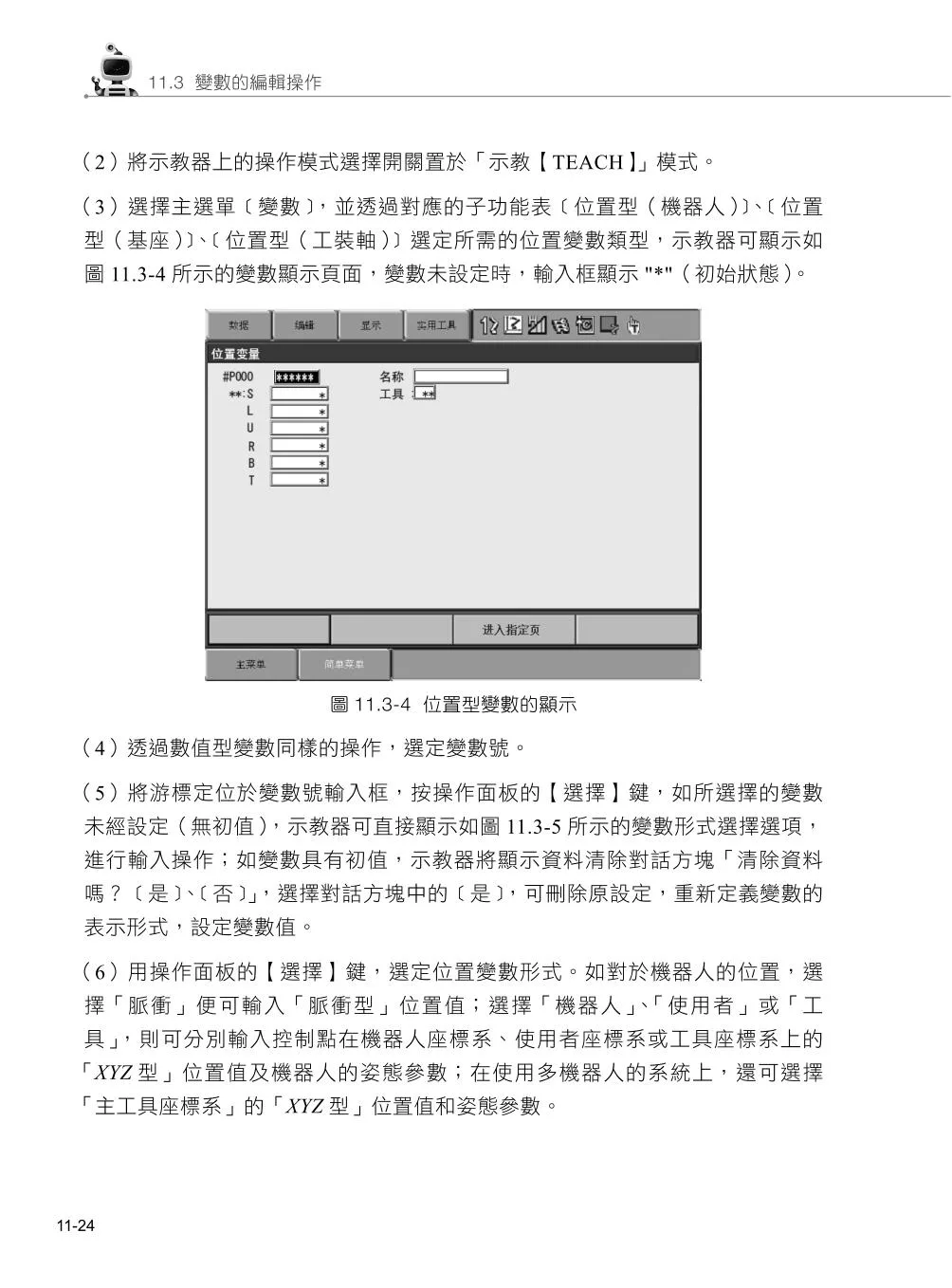
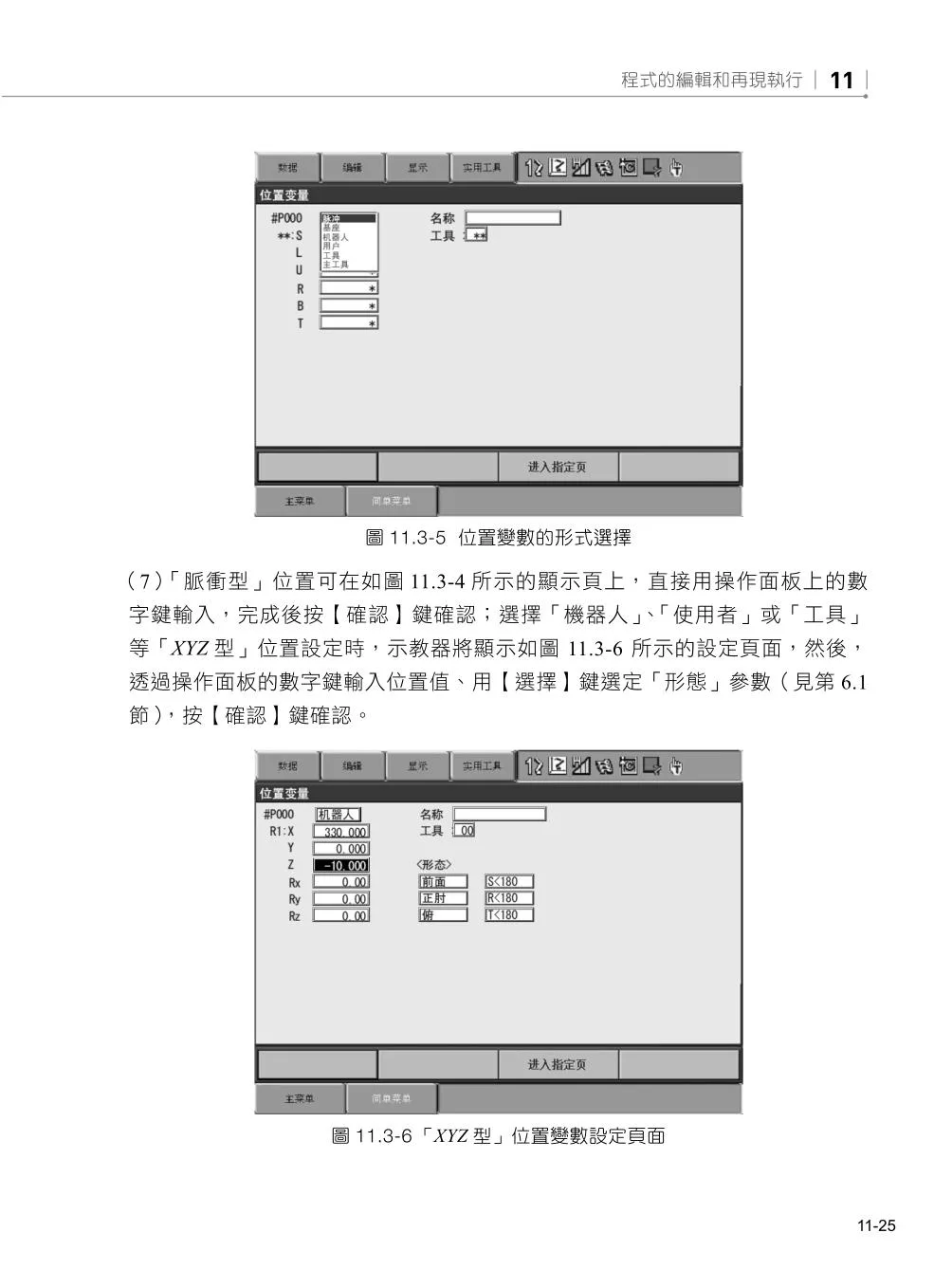
11.3 變數的編輯操作
11.4 再現方式與執行條件設定
11.5 程式的再現執行
第12章控制系統的功能設定
12.1 機器人原點的設定
12.2 工具檔案的設定
12.3 機器人進階安裝與設定
12.4 使用者座標系的設定
12.5 運動保護區的設定
第13章控制系統的偵錯與維修
13.1 系統顯示與操作設定
13.2 系統參數設定與硬體規格
13.3 系統資料儲存、恢復和初始化
13.4 系統的狀態監控
13.5 系統警告與故障處理
附錄1 安全模式與選單顯示、編輯總表
附錄2 DX100系統參數總表